
밥 먹고 공부 하고 자고
[Final Team Project] Golf Ball-Collecting Robot 본문
1. Project 개요
1) 목표
- 주어진 영역을 주행하며 객체를 찾아 정해진 장소에 모아주는 자율주행 시스템 개발
2) 기대 효과
- 배경 : 넓은 영역의 수동 공 수거를 위한 인력 소모 높음.
- 시간, 비용 절약
- 상업적 가치
- 광범위한 적용
3) 개발 환경
- 개발 기간 : 2023. 06. 05 ~ 2023. 06. 21 ( 17 일간 )

4) 팀원 소개
2. Project 과정
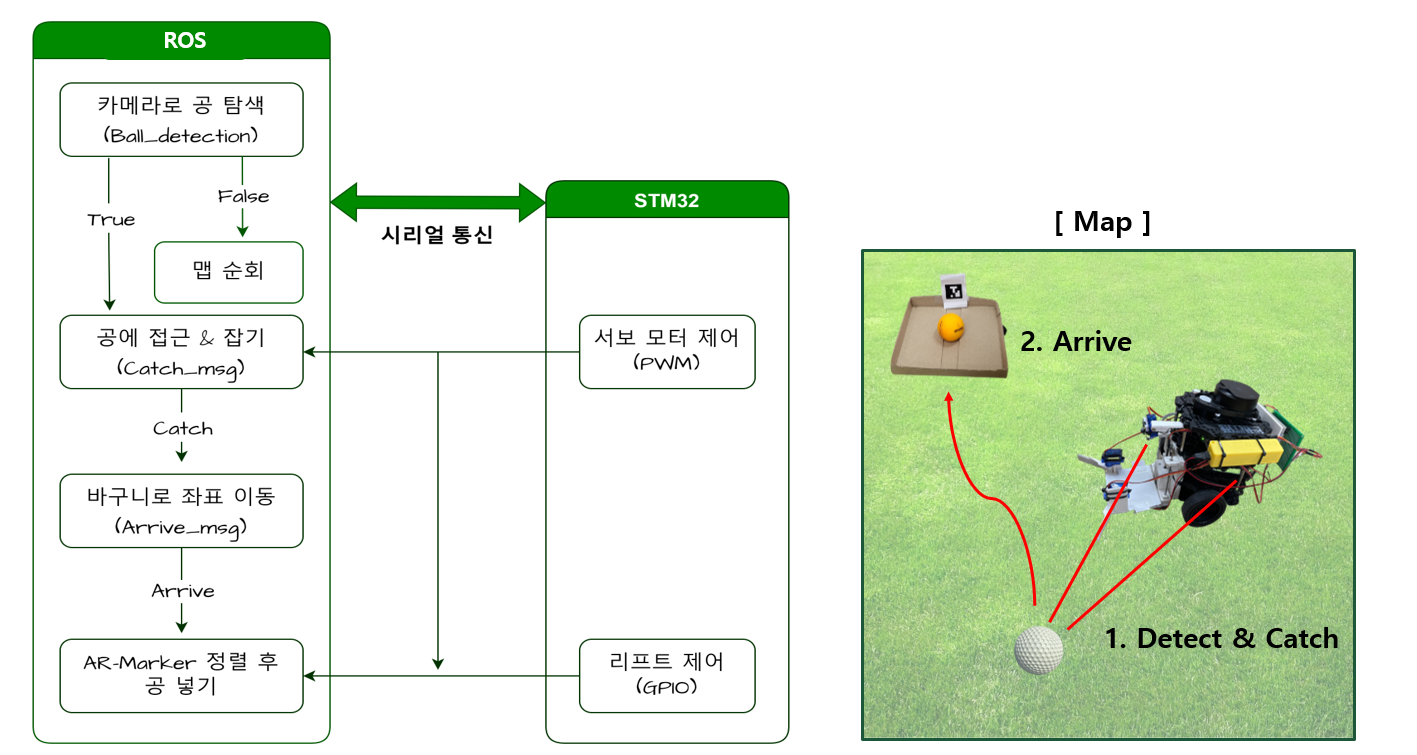
1) 구성도
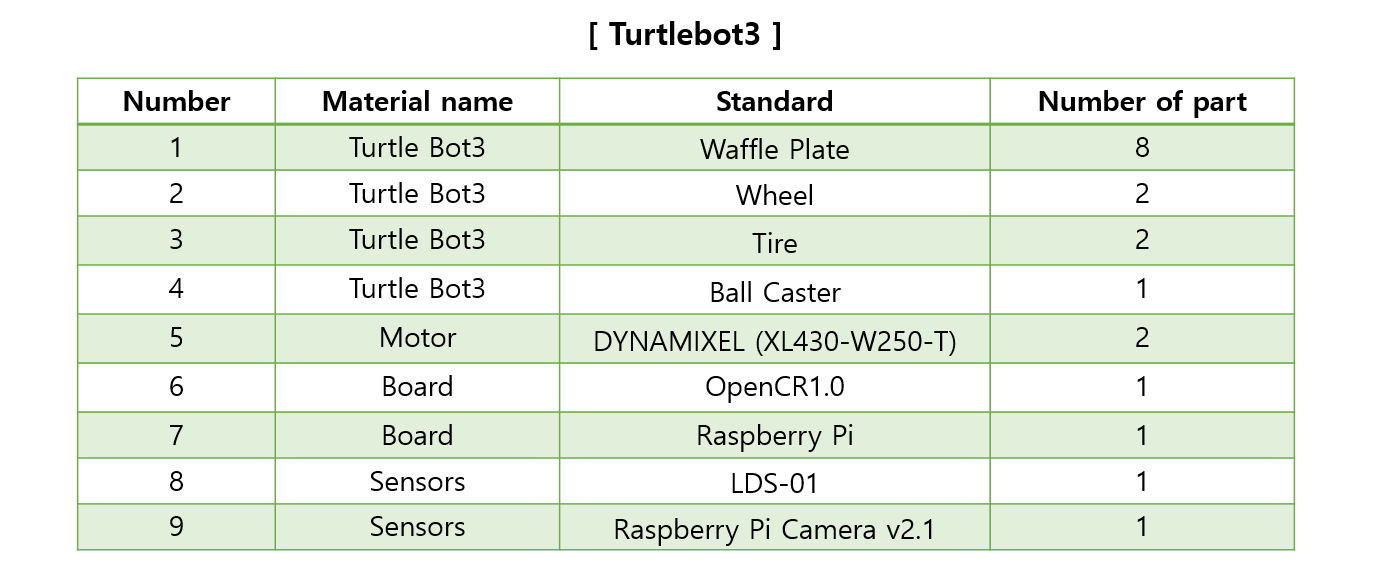
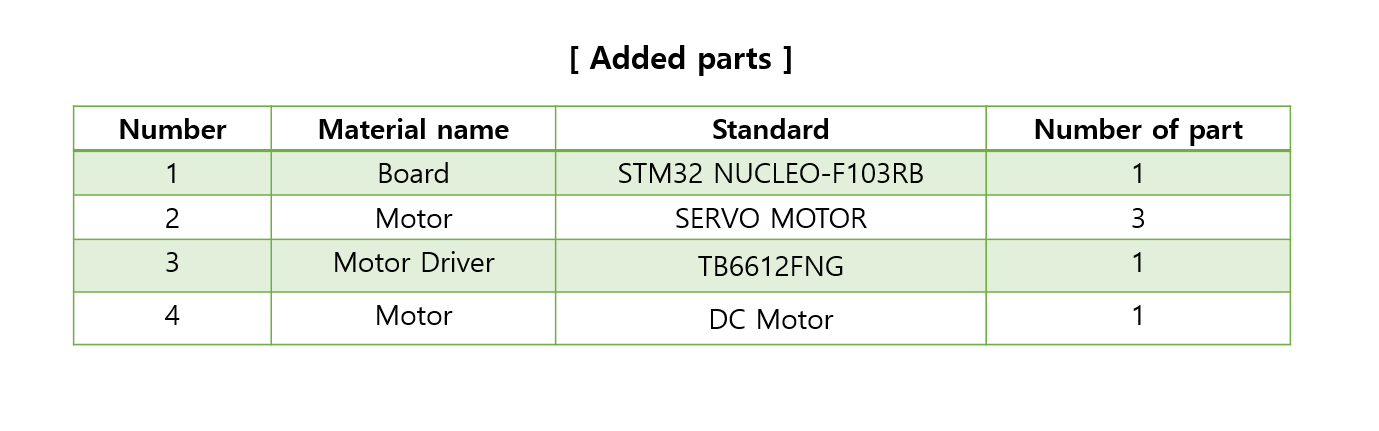
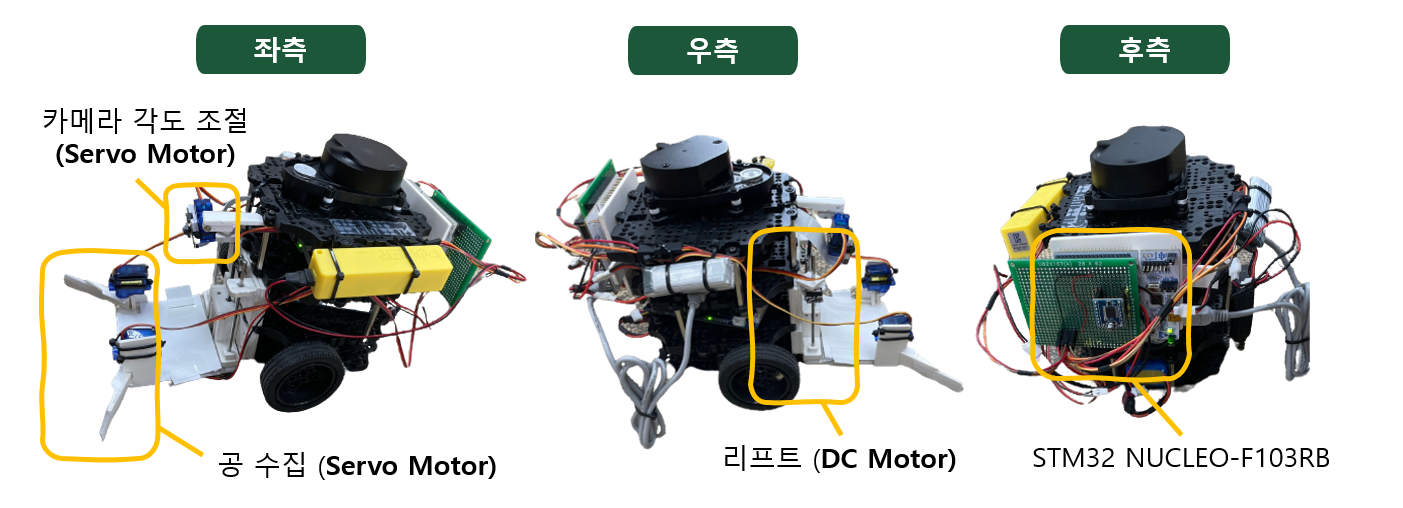
2) H/W 구성
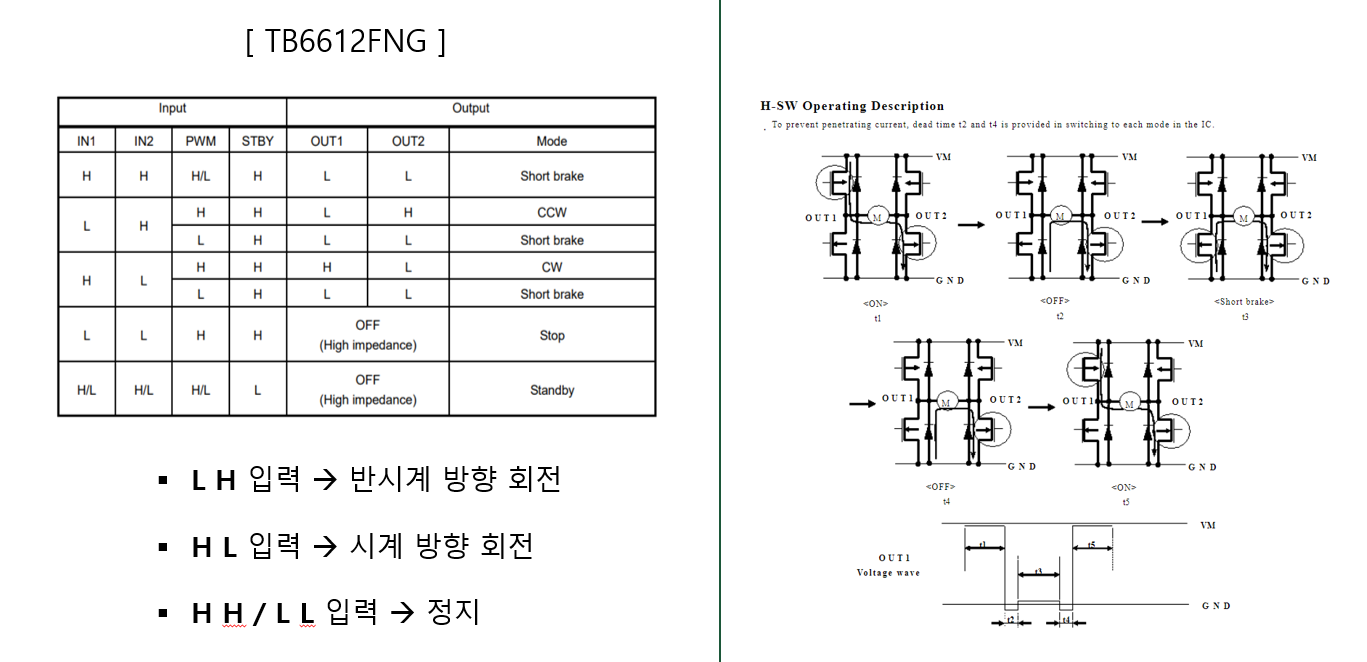
3) Firmware
- DC 모터
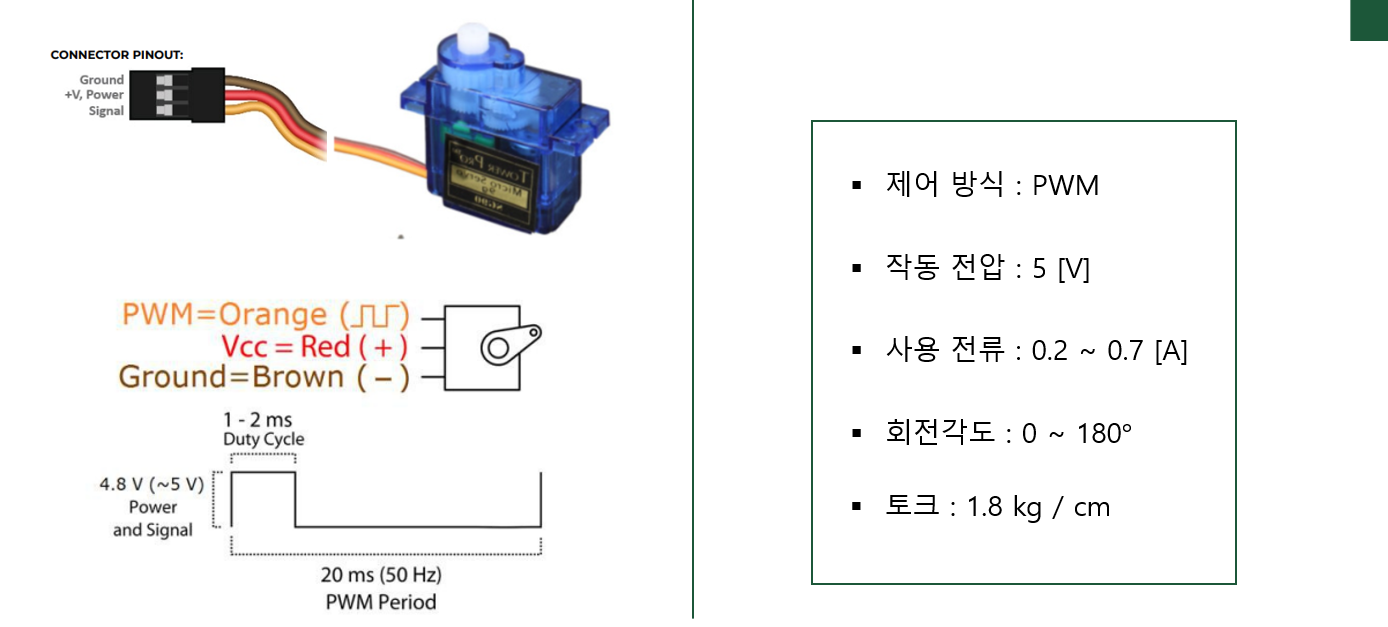
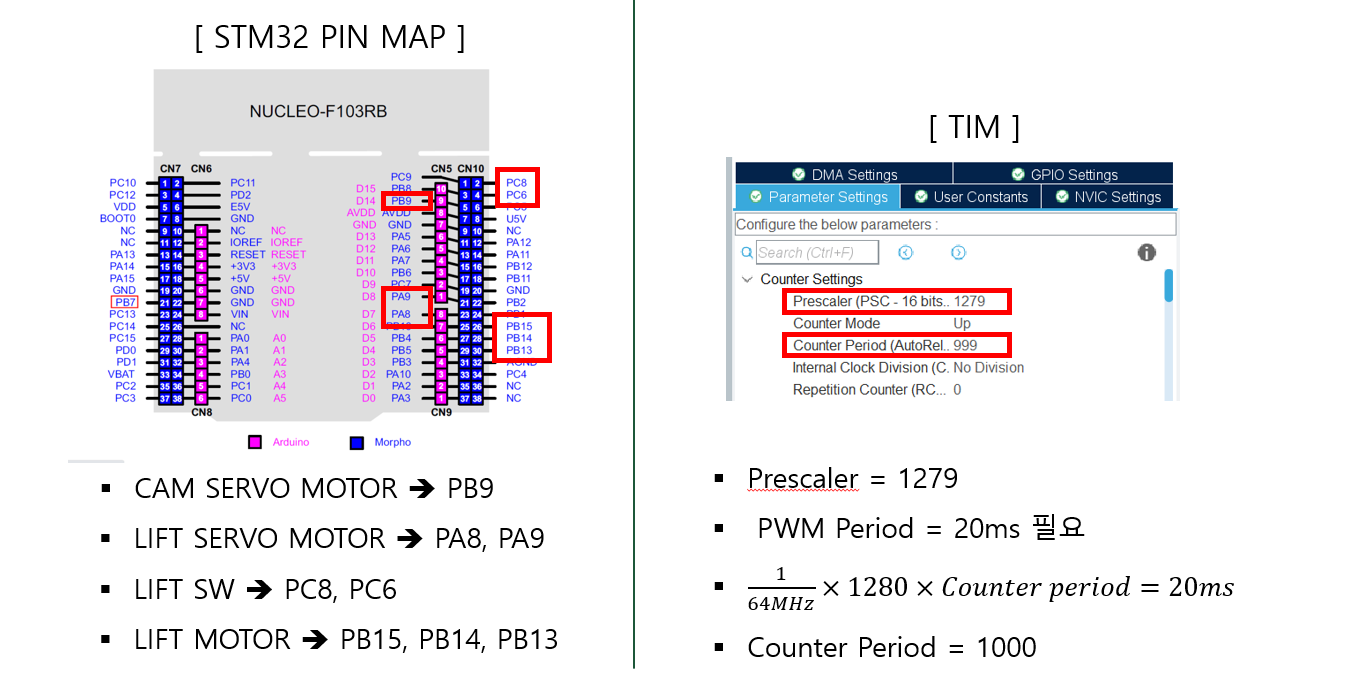
- 서보 모터
- H/W Setting
- 제작
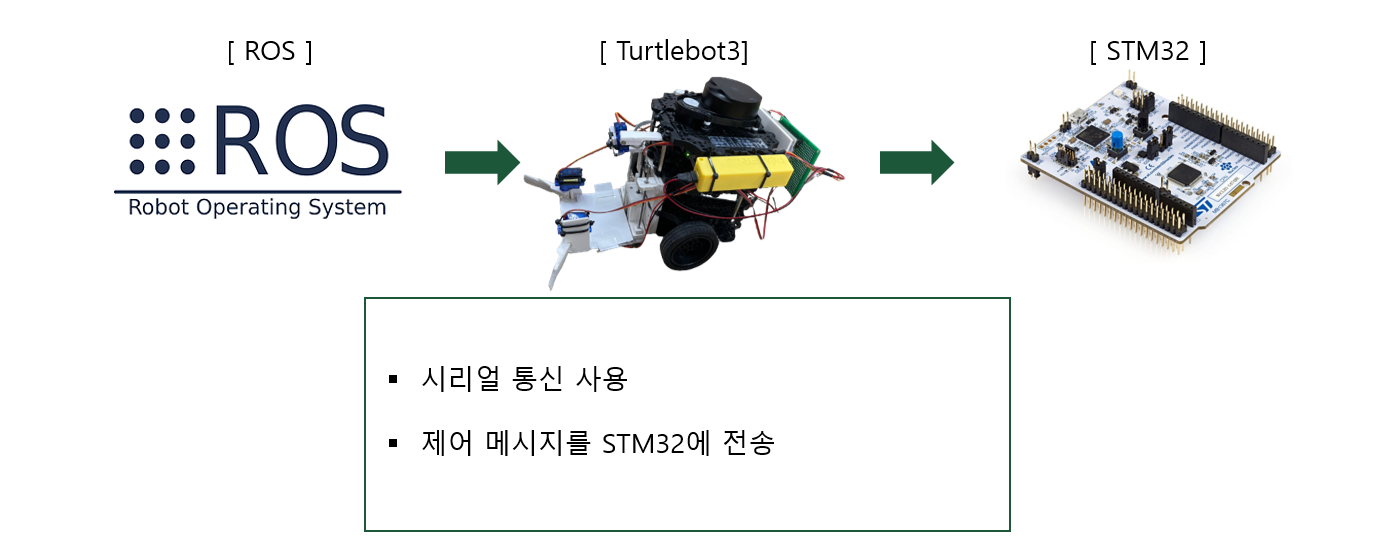
- 통신
4) ROS
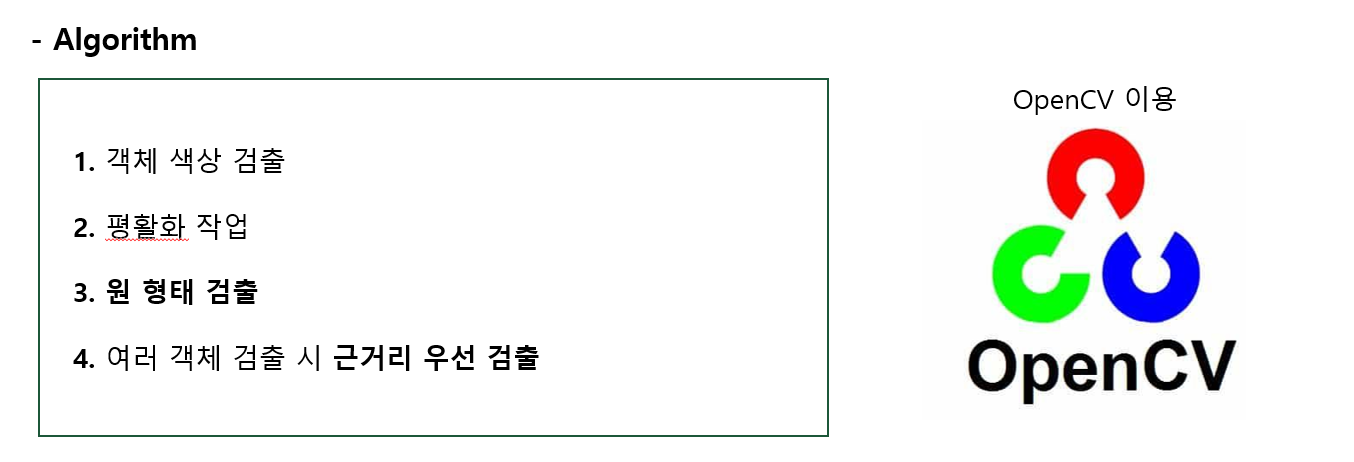
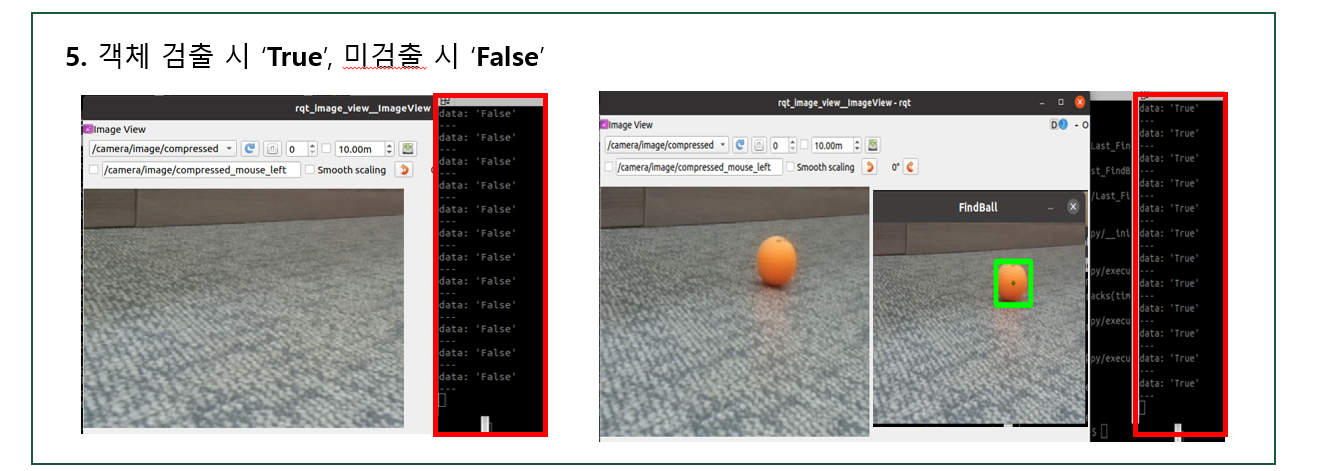
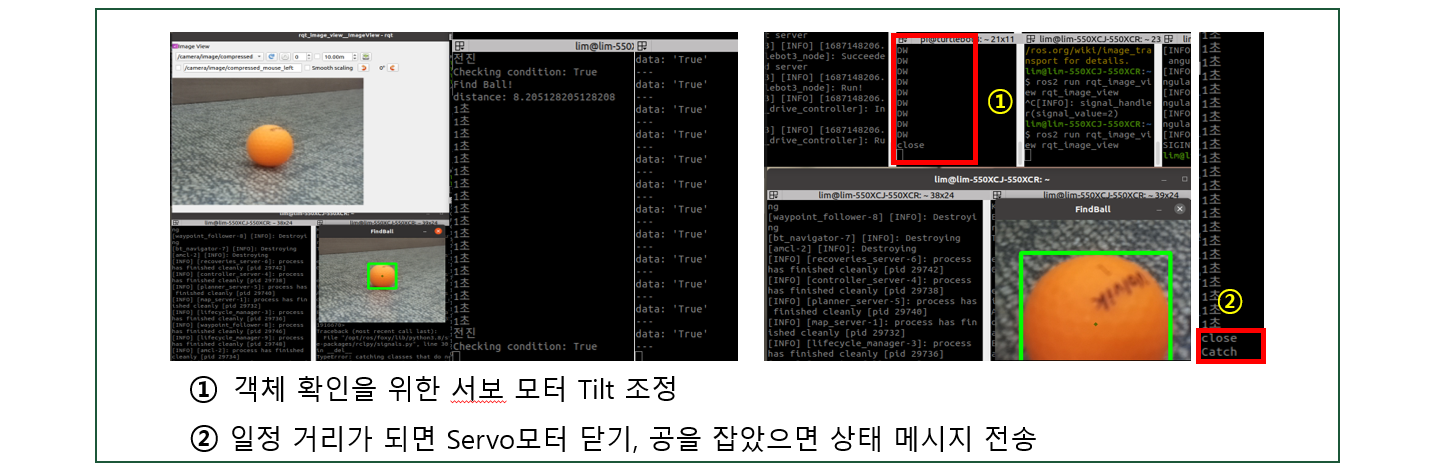
- 공 객체 검출
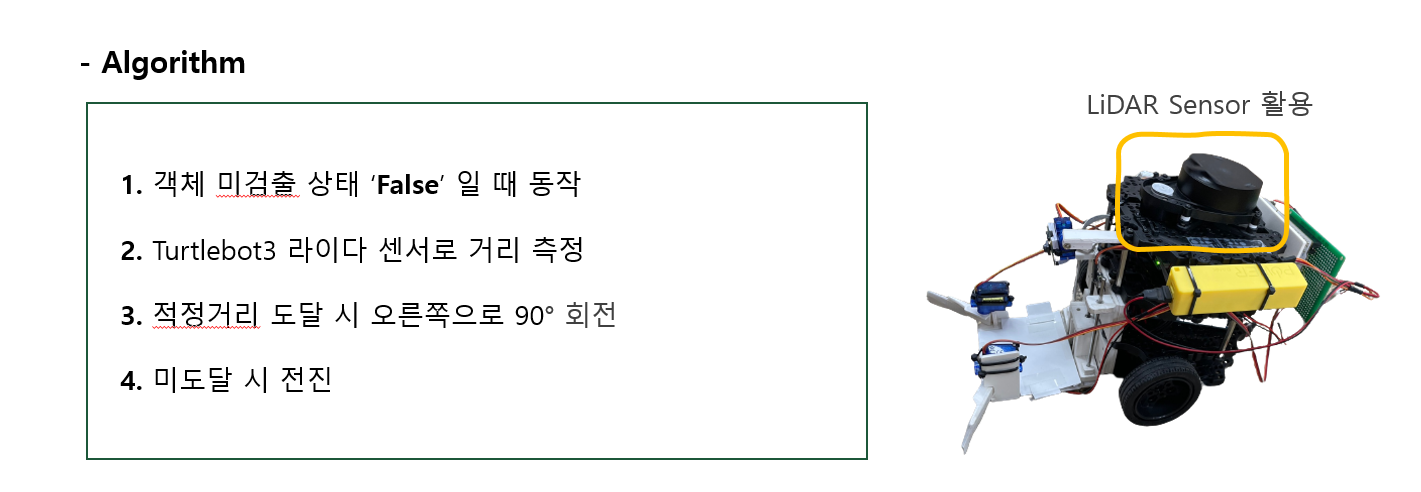
- 맵 순회
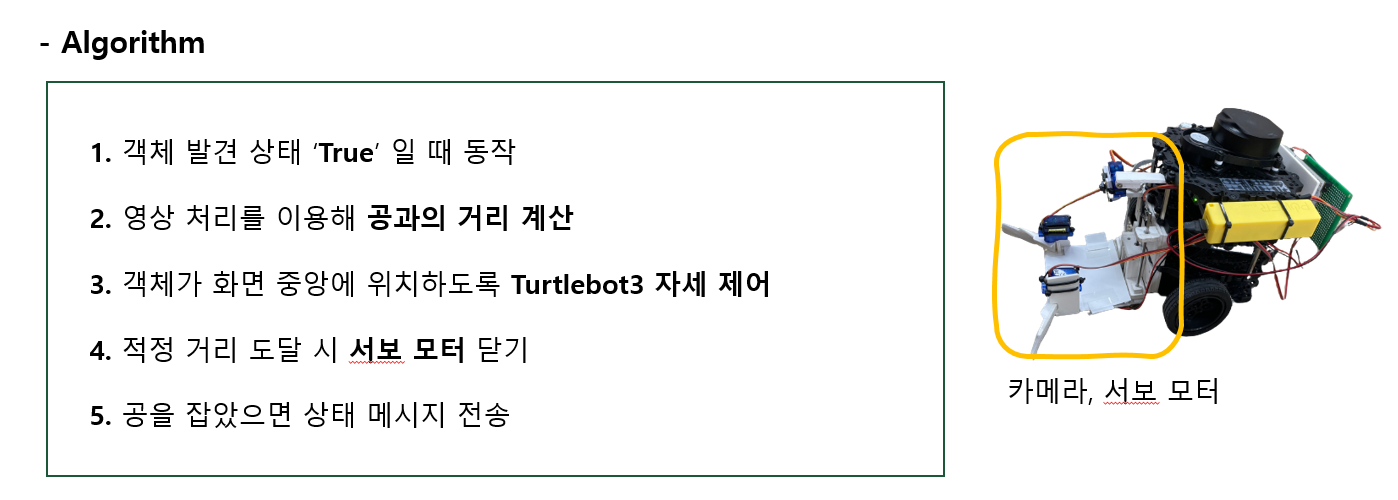
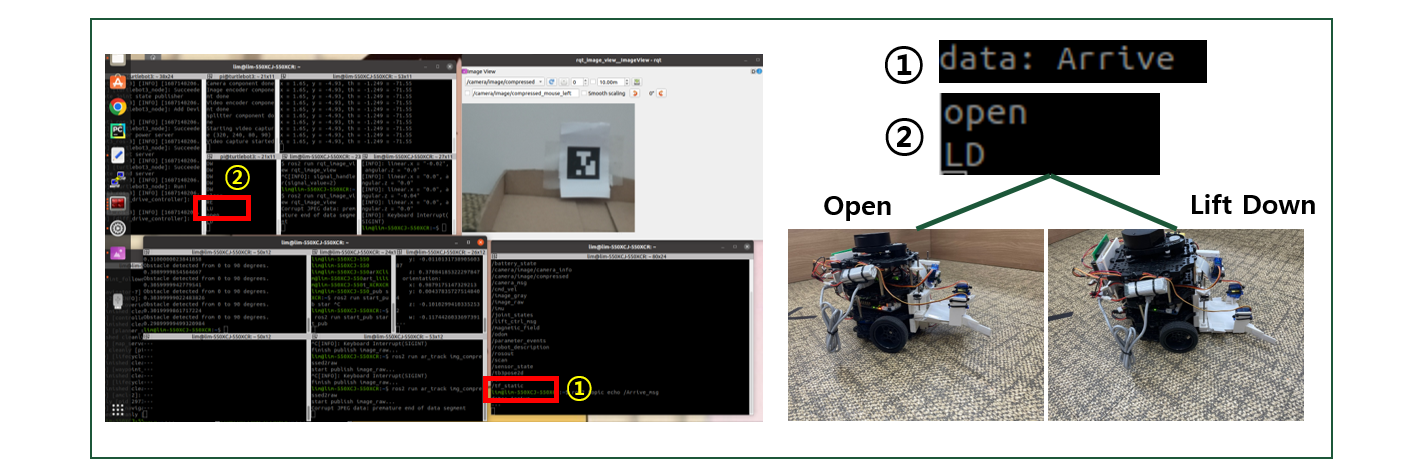
- 공에 접근 후 잡기
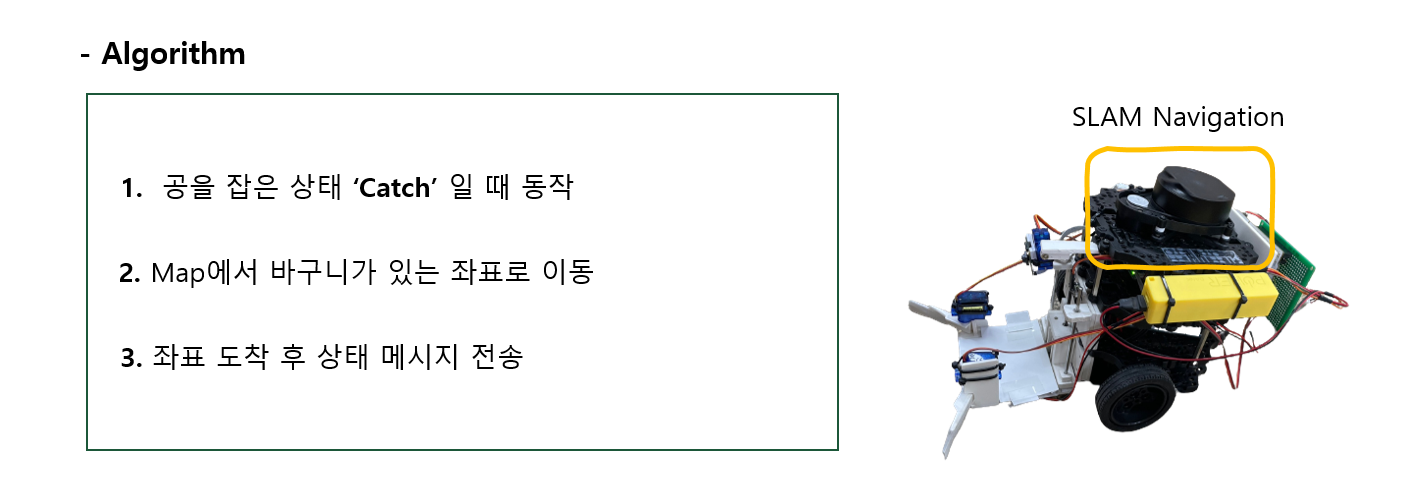
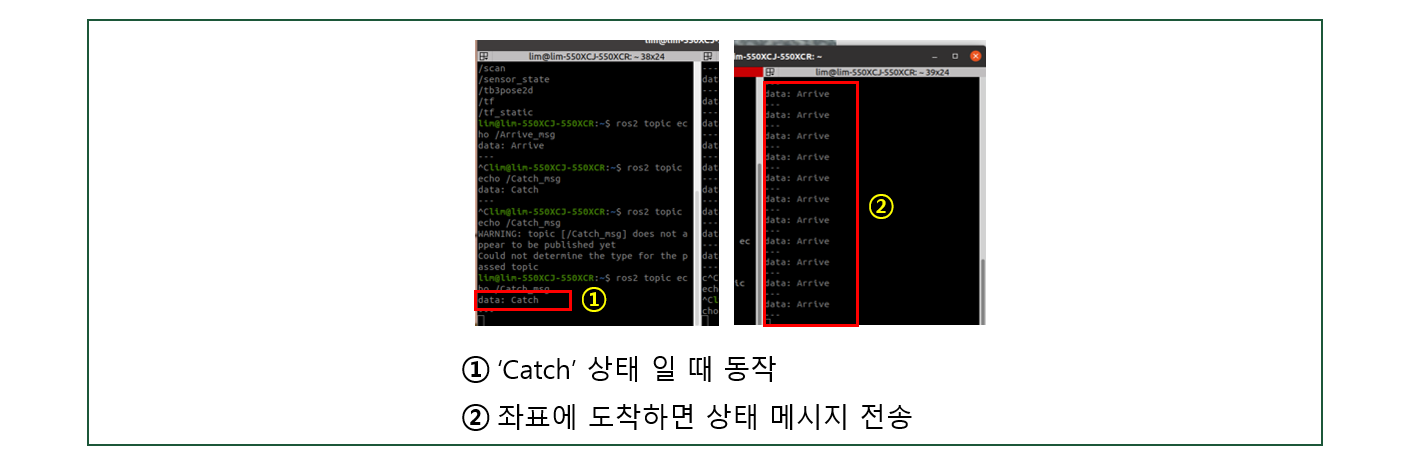
- 바구니 위치로 이동
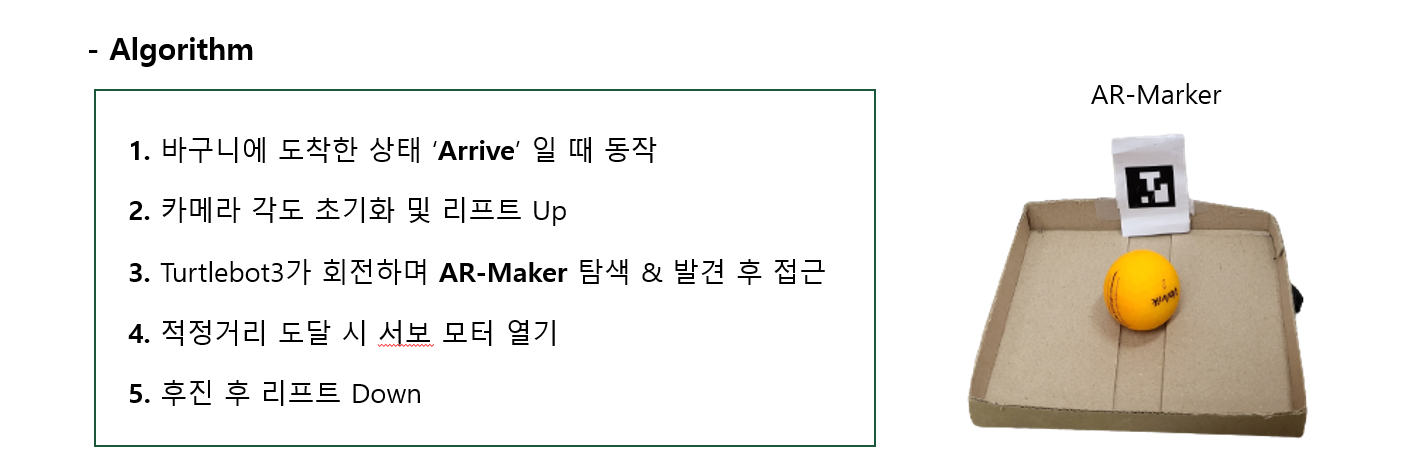
- 공 넣기
3. 결과
1) 한계점
- 형태와 색상이 비슷한 공 이외의 것들도 검출
- 네비게이션을 이용해 바구니 좌표 이동 시 최단 경로로 이동을 하지 않아 비효과적
- 1대의 로봇만 운용 시 생산성 효율 감소
2) 개선 방향
- 인공지능 모델을 이용하여 객체 검출
- 이동 경로를 저장 후 되돌아가는 알고리즘
- 시간, 비용 절약을 위한 Turtlebot3 멀티 운용
3) 느낀점
- OpenCV, STM32, 객체 지향 프로그래밍 등 배웠던 내용을 최대한 활용하여 Turtlebot3 자율주행 프로젝트를 진행할 수 있어 매우 뜻깊었고, 과정 시작 전과 후로 자신이 많이 성장하였음을 느낄 수 있어 더욱 뿌듯한 마지막 프로젝트였습니다.
4. 첨부 링크
- youtube : https://www.youtube.com/watch?v=WQTsIUAtMM8
- github : https://github.com/kyupyoLim/ROS-Final-Project
GitHub - kyupyoLim/ROS-Final-Project
Contribute to kyupyoLim/ROS-Final-Project development by creating an account on GitHub.
github.com